Safe and risk-aware automated driving in urban areas
PROJECT
Vision
In the current world of automated vehicles (AVs), the primary goal is to achieve high safety, while often
sacrificing usability. In particular in urban environments, human intervention is often required to maneuver
the AV out of a situation. The reasons for the urban challenges are manifold and include high levels of
occlusion and a high degree of uncertainty for the behavior of other traffic participants. To address these
challenges, a consortium consisting of Intel Deutschland GmbH (Intel Germany), Schaeffler Technologies AG &
Co. KG, Karlsruhe Institute of Technology (KIT), FZI Forschungszentrum Informatik, ANavS GmbH and Lake Fusion Technologies GmbH (LFT) started a joined research project called
“SafeADArchitect”. SafeADArchitect will be funded by the German Ministry for Economic Affairs and Energy for
2.5 years, with an official start in November 2020, and an expected end in March 2023.
The goal of the “SafeADArchitect” project is to develop new approaches and concepts to improve safety of
automated vehicles in urban environments. For this purpose, new methods that enable realtime monitoring and
mitigation of risks (e.g. collision risk, risk of control loss, etc.) will be in focus. In this regard, it
is a primary goal of “SafeADArchitect” to develop a comprehensive architecture solution including necessary
safety layers covering the complete system. This means that not only the main software components of the AV
are included in this study, but also the compute hardware itself, the necessary sensors and even the driving
platform will be considered. In addition, new ways to facilitate the certification process for functional
safety standards such as the ISO-26262 will be investigated.
The results of “SafeADArchitect” will help to enable and facilitate the development of safety concepts for
future AVs.
Concept
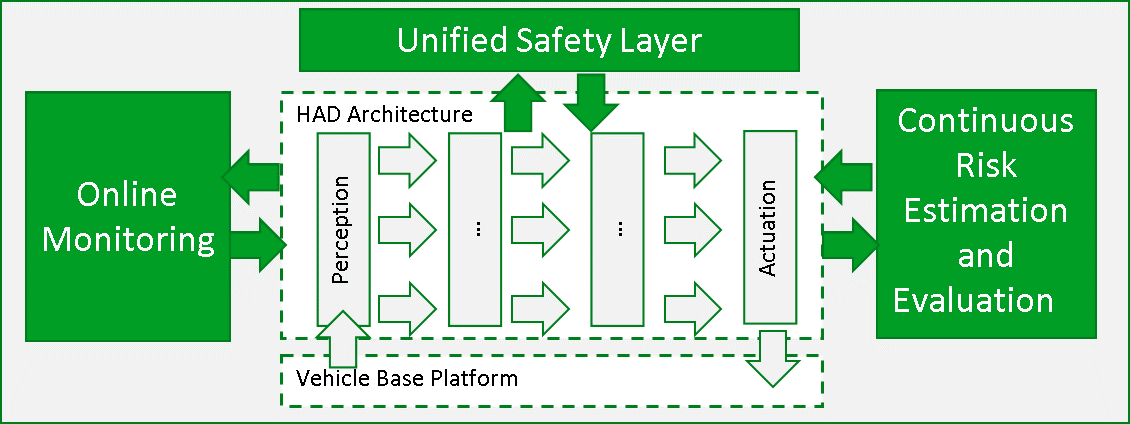
SafeADArchitect will research an overall system architecture that takes into account uncertainties and risks at various
levels in order to safeguard autonomous vehicles. The architecture thereby includes all
components from the vehicle platform to the exteroceptive and proprioceptive sensors, the environment
perception and the decision making process through to the vehicle's actuators. Therefore these components are
extended to enable a continous risk assessment, monitoring and minimization.
The risk assessment also allows for the evaluation of the expected risk of different maneuver options and to make an optimized decision after balancing them against an allowable overall risk.
As a result, the autonomous vehicle always acts in a risk-sensitive manner and does not make decisions that exceed
a given maximum risk. An independent risk assessment makes it easier to approve new components, since their
inputs and outputs are examined for risk. This means that systems can be developed to meet specific
requirements for certain scenarios without having to carry out a new overall assessment of safety compliance in each case. The concept is depicted in the figure below.
NEWS
The latest news about the project.
Intel Labs Germany Announces Participation in SafeADArchitect
We’re eager to announce that a new automated vehicle program we contributed to,
SafeADArchitect, has been approved for funding through the German Ministry for Economic Affairs and
Energy. Addressing safety concerns in urban environments, the project looks to make automated cities a
safer reality than ever.
SafeADArchitect: Mehr Sicherheit für autonome Fahrzeuge
Autonomes Fahren ist eines der großen Zukunftsthemen. Die Entwicklung macht stetig
Fortschritte und immer mehr Prototypen werden im Verkehr getestet. Eine große Herausforderung stellt dabei
das Thema Sicherheit dar. Aus diesem Grund will ein Konsortium aus Forschung und Industrie im Projekt
SafeADArchitect eine „sichere Architektur für Autonomes Fahren (Automated Driving)“ entwickeln. Ziel des
Projekts ist, die Entwicklung von Sicherheitskonzepten für autonome Fahrzeuge voranzutreiben und zu
erleichtern.
Workshop on IV 2021
Workshop chair on Safety of Automated Vehicles together with TU Braunschweig at the IEEE Intelligent Vehicles Symposium 2021 (https://www.tu-braunschweig.de/ifr/evsav/important-dates)
Paper contribution on IV 2021
Paper contribution on IEEE Intelligent Vehicles Symposium 2021, "RSS+: Pro-Active Risk Mitigation for AV Safety Layers based on RSS", Fabian Oboril and Kay-Ulrich Scholl, IEEE Intelligent Vehicles Symposium, Nagoya, 2021
Paper contribution on ITSC 2021
Paper contribution on IEEE Intelligent Transportation Systems Conference (ITSC), "What if? Behavior Estimation by Predicting Traffic Scenes from State Histories", Philip Schörner, Tobias Fleck and J. Marius Zöllner, IEEE Intelligent Transportation Systems Conference (ITSC), Indianapolis, 2021
Keynote on WAISE 2021
Keynote speaker on Fourth International Workshop on Artificial Intelligence (WAISE), "Safety Models for AV Decision Making", Fabian Oboril (https://www.waise.org/keynote)
Workshop on IV 2022
Workshop chair on Safety of Automated Vehicles together with TU Braunschweig at the IEEE Intelligent Vehicles Symposium 2022 (https://www.tu-braunschweig.de/ifr/evsav/important-dates)
Paper contribution on IV 2022
Paper contribution on IEEE Intelligent Vehicles Symposium 2022, "A Parameter Analysis on RSS in Overtaking Situations on German Highways", Hendrik Königshof, Fabian Oboril, Kay-Ulrich Scholl and Christoph Stiller, Aachen, 2022
Workshop Presentation on IV 2022
Presentation in Workshop on Safety of Automated Vehicles at the IEEE Intelligent Vehicles Symposium 2022, "Handling Residual Risk in Traffic Situations With Occluded Road Users”, Bernd Gassmann
Lidar and camera based perception
Recording runs for the lidar and camera based perception. Point clouds from the lidars and object detections from video stream are projected into the camera image.
Paper contribution on ITSC 2022
Paper contribution on IEEE Intelligent Transportation Systems Conference (ITSC), "Safe Perception - A Hierarchical Monitor Approach", Cornelius Buerkle, Fabian Oboril, Johannes Burr, Kay-Ulrich Scholl, IEEE Intelligent Transportation Systems Conference (ITSC), Macau, 2022
Paper contribution on IEEE ICECCME 2022
Paper contribution on IEEE International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), "Towards Multi Modal Risk Assessment", Philip Schörner, Daniel Grimm and J. Marius Zöllner, IEEE International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), 2022
Paper contribution on ION ITM 2023
Paper contribution on Institute of Navigation (ION) International Technical Meeting (ITM), "Intersection of Error Ellipsoids from at Least Two Positioning Sensors for Improved Sensor Fusion", Patrick Henkel, Medeea Horvat and Luka Sachße, ION ITM, 2023
Paper contribution on UR 2023
Paper contribution on 20th International Conference on Ubiquitous Robots (UR), "Lidar-slam using semantic information - how to deal with dynamic objects", Sven Ochs, Philip Schörner, Marc René Zofka, J. Marius Zöllner, 20th International Conference on Ubiquitous Robots, Hawaii, 2023
Paper contribution on ITSC 2023
Paper contribution on IEEE Intelligent Transportation Systems Conference (ITSC), "Application of Responsibility-Sensitive Safety in areas with limited visibility: Occlusions in RSS", Ignacio Alvarez, Bernd Gassmann, Shreya Dey, Fabian Oboril, Kay-Ulrich Scholl, IEEE Intelligent Transportation Systems Conference (ITSC), Bilbao, 2023
Paper contribution on ITSC 2023
Paper contribution on IEEE Intelligent Transportation Systems Conference (ITSC), "What Can We Learn from Virtual Sensor Models for Self Localization and Mapping for Autonomous Mobile Systems?", Sven Ochs, Tolgahan Percin, Christian Samuelis, Philip Schörner, Marc René Zofka, J. Marius Zöllner, IEEE Intelligent Transportation Systems Conference (ITSC), Bilbao, 2023
Final Event
Final video of the project.
Impressions of the final event
Find impressions of the final event on LinkedIn.
here
or
here
PARTNERS
* Intel and the Intel logo are trademarks of
Intel Corporation or its subsidiaries.
CONTACT
If you are interested in the project or have any questions, please
contact:
Wenn Sie auf unsere Webseite zugreifen werden automatisch folgende
Informationen über Sie in Form von Server-Logfiles gespeichert:
Ihr Webbrowser
Ihr Betriebssystem
Ihre IP-Adresse und Port
Die aufgerufene Webseite oder Bestandteile davon
Die Webseite, von der Sie uns besuchen
Der Zugriffszeitpunkt
Diese Daten werden auf Basis von Art. 6 Abs. 1 lit. f DSGVO erhoben und
der Zweck der Datenerhebung ist der Betrieb, die Wartung und der Schutz
unserer Systeme. Die Daten fallen standardmäßig bei jedem
Verbindungsaufbau mit einem Webserver im Internet an. Tritt ein Fehler
bei der Nutzung unserer Webseite auf oder vermuten wir einen Angriff
oder eine missbräuchliche Nutzung, dienen diese Daten dazu das
eingetretene Szenario zu reproduzieren. Ihre IP-Adresse wird zusätzlich
dazu genutzt um auf monatlicher Basis die Anzahl der Besucher auf
unserer Webseite zu ermitteln. Alle derart erhobenen Daten werden für
einen Zeitraum von 6 Monaten gespeichert und anschließend gelöscht.
Cookies und Analyse-Tool
Für den Besuch unserer Webseite ist die Speicherung von Cookies nicht
notwendig. Wir verwenden auf der Webseite keinerlei Software um das
Nutzungsverhalten der Webseiten-Besucher zu analysieren (z.B. Google
Analytics).
Ihre Rechte
Als Betroffener einer Datenerfassung stehen Ihnen umfassende Rechte zu (Art. 15-23 DSGVO):
Das Recht jederzeit Auskunft über Ihre bei uns gespeicherten Daten zu erhalten
Das Recht die Einschränkung der Verarbeitung Ihrer Daten zu fordern oder der Verarbeitung zu
widersprechen
Das Recht die Sperrung oder Löschung Ihrer Daten zu verlangen
Das Recht Ihre Daten berichtigen zu lassen
Das Recht Ihre bei uns gespeicherten Daten in einem maschinenlesbaren Format zu erhalten
(„Datenübertragbarkeit“)
Möchten Sie Ihre Rechte geltend machen, schicken Sie uns einfach eine
E-Mail an die oben genannte Kontaktadresse (datenschutz@fzi.de).
Zusätzlich haben Sie natürlich jederzeit das Recht sich, bei Verdacht
auf einen Verstoß gegen das Datenschutzrecht, bei der zuständigen
Aufsichtsbehörde zu melden.
Data Protection Declaration
Data Protection Declaration
Responsible body
FZI Forschungszentrum Informatik
FZI Research Center for Information Technology
Haid-und-Neu-Straße 10-14
76131 Karlsruhe, Germany
Email: datenschutz@fzi.de
Visit the website
When you access our website, the following information about you is automatically stored in the form
of server log files:
your web browser
your operating system
your IP address and port
the accessed website or parts thereof
the website from which you are visiting us
the access time
This data is collected on the basis of Section 6 Par. 1 letter f GDPR and the purpose of the data
collection is the operation, maintenance and protection of our systems. The data is generated by
default every time a connection is established with a web server on the Internet. If an error occurs
while using our website or we suspect an attack or an abusive use, these data serve to reproduce the
scenario that occurred. Your IP address is also used to determine the number of visitors to our
website on a monthly basis. All data collected in this way is stored for a period of 6 months and then
deleted.
Cookies und Analyse-Tool
The storage of cookies is not necessary for visiting our website. The FZI does not use any software on
its website to analyse the usage behaviour of website visitors (e.g. Google Analytics).
Social media
To protect your personal rights, the FZI does not include any social media feeds on its website.
Accordingly, when you use our website, no information about you is transferred to third parties (such
as Twitter or Facebook). The buttons in the footer of our website are links to our social media sites
and must be actively clicked by you to be redirected there.
Registration for events
If you register for one of our events, by accepting our general terms and conditions for events, a
contract is concluded with us, for which we need your first name and surname. After submitting the
registration form, you will receive an email containing your data for checking purposes – for this we
need your email address. In order to be able to charge you the participation fee, we also need the
name and address of your company, or your private address if the invoice should be sent to you
privately. We also collect your telephone number in order to be able to contact you in case of queries
or short-term changes in event planning. The data is thus collected on the basis of Section 6 Par. 1
lit. b GDPR. After the end of the event for which you have registered, all data collected in this way
will be deleted.
Contact
If you contact us via the e-mail addresses provided by the contact persons, we will process your e-mail address and the data provided in your e-mail in order to answer and process your inquiry. This is done on the basis of your consent. You can revoke this consent at any time. If you contact one of our partners, for example by clicking on the partner's social media button or by sending an email to the partner, the responsibility for data processing does not lie with us, but with the respective partner.
Your rights
As a subject affected by data collection, you have comprehensive rights (Section 15-23 GDPR):
The right to receive information about your data stored by us at any time
The right to request or object to the restriction of the processing of your data
The right to request the blocking or deletion of your data
The right to have your data corrected
The right to receive your data stored with us in a machine-readable format ("data
transferability")
If you would like to assert your rights, simply send us an email to the above contact address
(datenschutz@fzi.de). In addition, you have the right to report any suspected breach of the GDPR to
the responsible supervisory authority at any time.